Add tutorials for ApplyForceTorque and MouseDrag plugins #2083
Conversation
Signed-off-by: Henrique-BO <[email protected]>
Signed-off-by: Henrique-BO <[email protected]>
Codecov Report
@@ Coverage Diff @@
## gz-sim7 #2083 +/- ##
===========================================
- Coverage 64.98% 64.97% -0.02%
===========================================
Files 356 356
Lines 28783 28783
===========================================
- Hits 18704 18701 -3
- Misses 10079 10082 +3 |
tutorials/apply_force_torque.md
Outdated
| ## Examples | ||
|
|
||
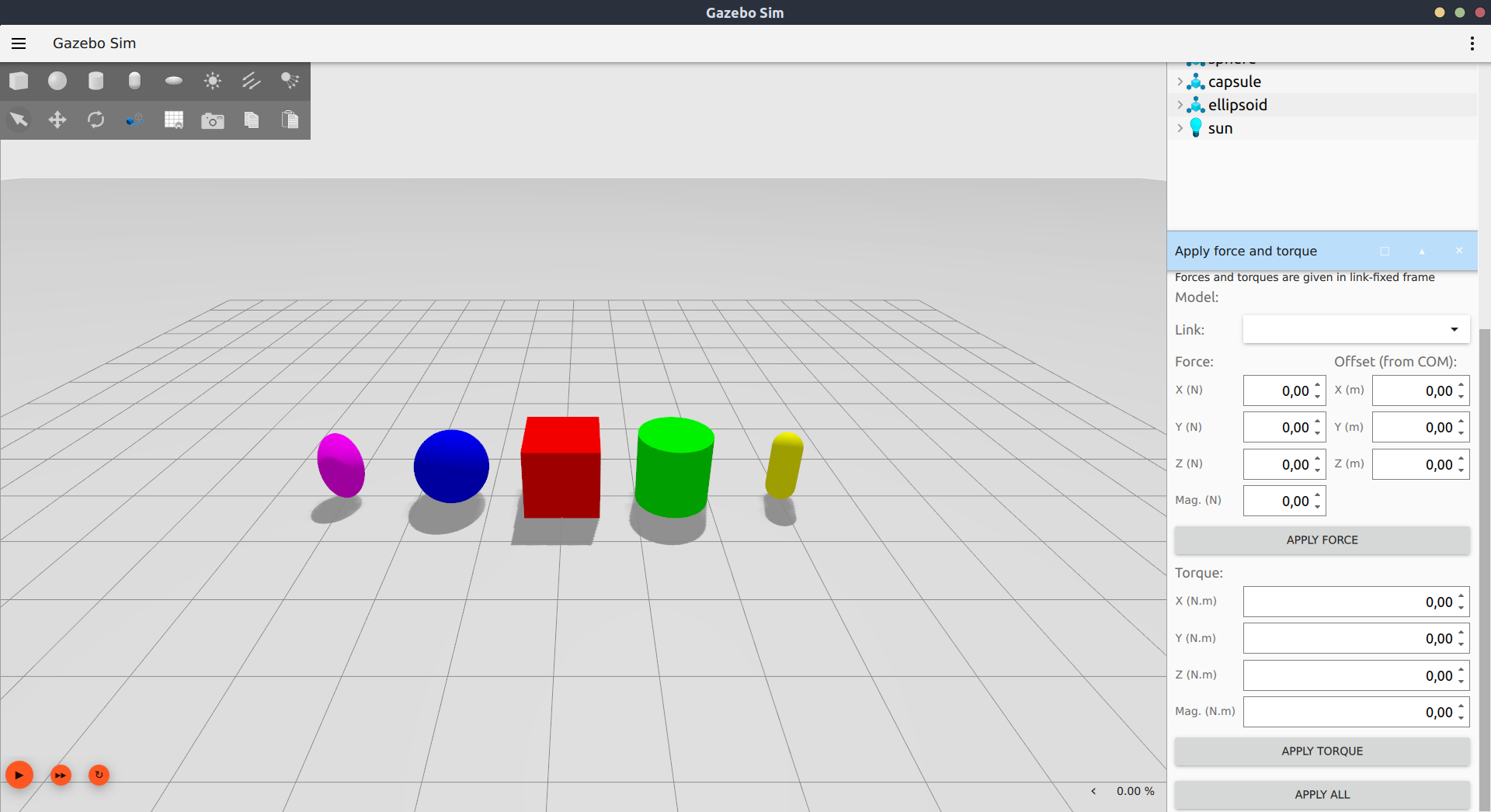
| Let's go through an example of applying force and torque to simple models. Open | ||
| the `shapes` world with |
There was a problem hiding this comment.
| the `shapes` world with | |
| the `shapes.sdf` world with: |
tutorials/apply_force_torque.md
Outdated
|  | ||
|
|
||
|
|
||
| ### Apply force to a link |
There was a problem hiding this comment.
|  | |
| ### Apply force to a link | |
|  | |
| ### Apply force to a link |
There was a problem hiding this comment.
Done in f977a8c
| @@ -0,0 +1,115 @@ | |||
| \page apply_force_torque Apply Force and Torque | |||
There was a problem hiding this comment.
I think you'll need to add a link to this page in https://github.com/gazebosim/gz-sim/blob/gz-sim7/tutorials.md.in
tutorials/apply_force_torque.md
Outdated
|
|
||
| On the dialog, write `10000` on the `X` field under `Force`. Click on the force | ||
| vector to make the rotation tool appear. Drag the blue circle to rotate the | ||
| force so that it is alligned with the `Y` direction. Notice how the XYZ fields |
There was a problem hiding this comment.
| force so that it is alligned with the `Y` direction. Notice how the XYZ fields | |
| force around the `Z` axis so that it is aligned with the `Y` direction. Notice how the XYZ fields |
tutorials/apply_force_torque.md
Outdated
| ### Force | ||
|
|
||
| - **Force X, Y, Z**: Each field specifies how much force will be applied on that | ||
| direction, in N. The frame is fixed to the link. |
There was a problem hiding this comment.
| direction, in N. The frame is fixed to the link. | |
| direction, in Newtons (N). The frame is fixed to the link. |
tutorials/apply_force_torque.md
Outdated
| in meters. Here you can edit the X, Y and Z fields to give the force an offset | ||
| with respect to the center of mass expressed in the link's frame. | ||
|
|
||
| - **Tip**: Right-click the model and choose View -> Center of mass to see its |
There was a problem hiding this comment.
| - **Tip**: Right-click the model and choose View -> Center of mass to see its | |
| - **Tip**: Right-click the model and choose `View` -> `Center of Mass` to see its |
tutorials/apply_force_torque.md
Outdated
| with respect to the center of mass expressed in the link's frame. | ||
|
|
||
| - **Tip**: Right-click the model and choose View -> Center of mass to see its | ||
| position. You might want to also make the model transparent for that. |
There was a problem hiding this comment.
| position. You might want to also make the model transparent for that. | |
| position. You will want to also make the model transparent to see the center of mass visual (`View` -> `Transparent`). |
tutorials/apply_force_torque.md
Outdated
| position. You might want to also make the model transparent for that. | ||
|
|
||
| - **Apply Force**: Click this to apply only force for one time step. Keep in | ||
| mind that time steps are in the order of milliseconds, so relatively large |
There was a problem hiding this comment.
| mind that time steps are in the order of milliseconds, so relatively large | |
| mind that time steps are typically in the order of milliseconds, so relatively large |
tutorials/apply_force_torque.md
Outdated
| ### Torque | ||
|
|
||
| - **X, Y, Z**: Each field specifies how much torque will be applied about that | ||
| axis, in N.m. The frame is fixed to the link. |
There was a problem hiding this comment.
| axis, in N.m. The frame is fixed to the link. | |
| axis, in Newton-meters (N.m). The frame is fixed to the link. |
tutorials/apply_force_torque.md
Outdated
| fields proportionally, maintaining the torque direction. | ||
|
|
||
| - **Apply Torque**: Click this to apply only torque for one time step. Keep in | ||
| mind that time steps are in the order of milliseconds, so relatively large |
There was a problem hiding this comment.
| mind that time steps are in the order of milliseconds, so relatively large | |
| mind that time steps are typically in the order of milliseconds, so relatively large |
tutorials/apply_force_torque.md
Outdated
| editing the numbers on the XYZ fields. | ||
|
|
||
| From the scene, select a vector to enable the rotation tool, then drag the | ||
| circles. This changes the direction of the vector, updating the XYZ fields |
There was a problem hiding this comment.
| circles. This changes the direction of the vector, updating the XYZ fields | |
| handles. This changes the direction of the vector, updating the XYZ fields |
| @@ -0,0 +1,66 @@ | |||
| \page mouse_drag Mouse Drag | |||
There was a problem hiding this comment.
There was a problem hiding this comment.
Done in 8a4afa7
Signed-off-by: Henrique-BO <[email protected]>
tutorials.md.in
Outdated
| @@ -51,6 +51,8 @@ Gazebo @GZ_DESIGNATION_CAP@ library and how to use the library effectively. | |||
| * \subpage spherical_coordinates "Spherical coordinates": Working with latitude and longitude | |||
| * \subpage underwater_vehicles "Underwater Vehicles": Understand how to simulate underwater vehicles. | |||
| * \subpage logicalaudiosensor "Logical Audio Sensor": Using the LogicalAudioSensor system to mimic logical audio emission and detection in simulation. | |||
| * \subpage apply_force_torque "Apply Force and Torque": Applying forces and/or torques to models during simulation through the GUI. | |||
| * \subpage mouse_drag "Mouse Drag": Move models by dragging them in the scene using forces and torques. | |||
There was a problem hiding this comment.
I think these are GUI and rendering features?
There was a problem hiding this comment.
Good point, changed it in 33e5d79
Signed-off-by: Henrique-BO <[email protected]>
🎉 New feature
Requires #2051, #2056
Summary
Adds tutorials for the new ApplyForceTorque plugin (including the features added in #2051 and #2056) and for the new MouseDrag plugin.
Test it
Checklist
codecheckpassed (See contributing)Note to maintainers: Remember to use Squash-Merge and edit the commit message to match the pull request summary while retaining
Signed-off-bymessages.